Inhalt
Vor dem Start
Für die Planung und Verfolgung eines Ballonfluges stehen einige Werkzeuge zur Verfügung. In diesem Artikel habe ich auch ein paar Links gesammelt, denne ich im Internet begegnet bin. Für die Praxis hält man sich aber am besten an die Dienste, die Habhbub.org bietet und dort beschrieben werden:
- deren Cambridge Flight Predictor hat sich bei den beiden Schweizer Flügen sehr bewährt; mit dem Habhub ist es nahtlos in einfach zu bedienendes Gesamtsystem eingebunden
- es hat auch hier in der Schweiz bisher mit genauen Prognosen bis auf wenige Kilometer Abweichung überzeugt
- für die Verfolgung bietet Hahbhub/UKHas auch so ziemlich alles, was nötig ist (Karte, Chase Car App, Habhub Tracker App)
Genauere Beschreibungen findet man dort und im Blog von Dave Akermann.
Planung
Mit dem Burst Calculator und dem Cambrige Predictor von UKHAS kann die Flugroute 2-3 Tage im voraus berechnet werden. Die Daten des Ballons und das Gewicht der Nutzlast muss man wissen.
- Webseite UKHAB: http://predict.habhub.org/
- Burst Calculator
- die stündliche Version http://predict.habhub.org/hourly/cambridge/
- rechtzeitig Flug beim Habhub anmelden und vorher alle Details der Telemetrie festlegen (nicht mehr modifizieren)
- Anmeldung und Statusabfrage von payload und flight Dokumenten prüfen im IRC Channel „Bot“
Bilder von einer alten Simulation:

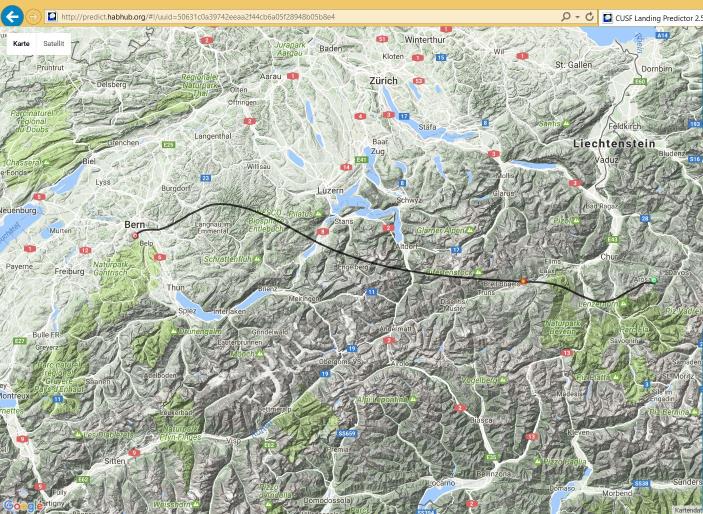
Die Vorhersage kann man sich im KML-Format ausgeben lassen und in Google Earth so den Flug in 3D verfolgen. So erhält man auch sofort einen Eindruck über die Überflughöhe. Nicht unbedingt ist der Funkempfang direkt unter dem Ballon gut (vor allem wenn vertikale Antennen benützt werden!); ein flacherer Sichtwinkel zu ihm kann von Vorteil sein.

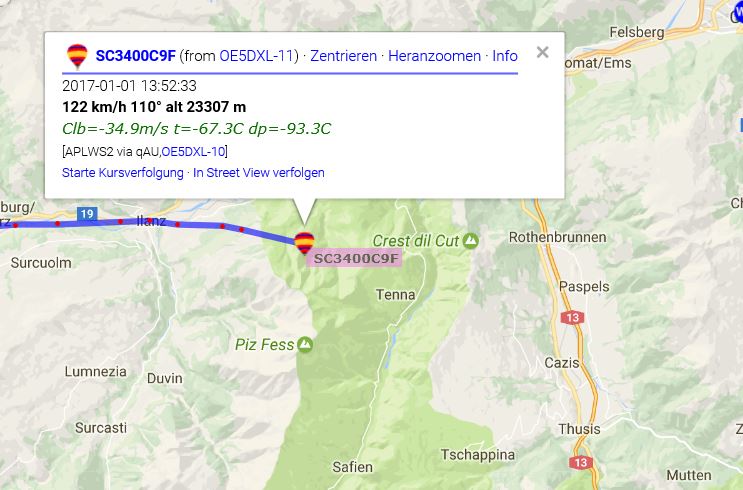
Ein echter Flug (Meteosonde, passend zur Simulation oben):
Wahl des Startortes
Für die Wahl des Startortes gibt es einiges zu überlegen:
- in Flughafennähe darf nicht gestartet werden
- Achtung auf Hochspannungsleitungen etc.
- auch wenn das erlaubte Gewicht nicht überschrittten wird, ist es nicht schlecht, das BAZL zu informieren
- empfohlen ist auch, lokale Segelfluggruppen zu informieren
- Der berechnete Landeort sollte in gut zugänglichem Gelände sein. Nötigenfalls sollte der Startort noch angepasst werden (falls möglich) oder verschoben werden
- Es hat sich bewährt, zuerst den Landeort festzulegen und dazu den Startort entsprechend zu wählen. Funkempfang und Zugänglichkeit des Zieles sind wichtiger – ebenso hat man vor dem Start eher mehr Zeit als nach der Landung, wenn man sich in unbekanntem Geländer orientieren muss. Nicht auf der Dorfwiese starten und auf dem Gletscher suchen 🙂
- als Konsequenz darf man kein Material vergessen
- man muss nötigenfalls ohne WiFi die Startvorbereitungen machen können
- Flugzeit beachten (Nachteinbruch?)
- Anfahrtswege ins ungefähre Zielgebiet planen (wenn man die Gegend nicht kennt)
- geeignete Funk-Beobachtungspunkte vorher planen
Nach dem Start
- Den IRC Channel braucht man nach dem Start eigentlich nicht mehr. Da hierzulande auch keine Community von Ballonjägern exisitiert, braucht man den Chat Channel nicht.
- Die empfangenen APRS eines aktiven Fllugs (mit flight document) werden automatisch ins habhub eingeliefert, sodass man dies auch nicht mehr konfigurieren muss.
- Der berechnete Landeort wird im tracker.habhub.org angezeigt und fortlaufend angepasst.
- Es lohnt sich, beim Start unmittelbar nochmal die Vorhersage zu prüfen. Beim letzten Ballonflug hat eine starke Windströmung den Ballon ca. 30km abgetrieben – die Vorhersage zum Startzeitpunkt hat dies sehr genau berücksichtigt, im Gegensatz zur Prognose wenige Stunden vorher.
Flight Prediction (im PITS Code)
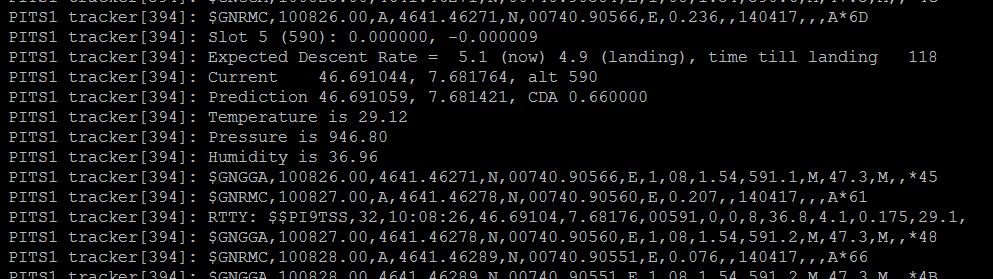
Der PITS macht selber eine Landing Prediction, siehe Daves Blog. Der Code ist bereit seit einiger Zeit im PITS drin – über die pisky.txt Datei aktivierbar. Die Funktionsweise ist mir noch nicht ganz klar.
- PITS liefert am Bildschirm Landeortvorhersage und in der Telemetrie – wird sie wirklich übertragen? Wird sie im dl-flidigi/habhub ausgewertet? Wie?
- im APRS ist das wohl nicht vorgesehen
Den Code in predition.c müsste man dazu anschauen und die Einbindung studieren (tracker.c). Es gibt auch eine Datei prediction.txt, die die on-board Landeortvorhersage aufzeichnet. Interessant wäre ein Vergleich mit den echten Live-Daten!